DigiMetrix Robotics Library for DENSO

Overview
With the DigiMetrix Robotics library for DENSO, you can easily integrate robotics into new types of systems and applications for automated test, laboratory automation, and flexible manufacturing – eliminating complex robotics programming expertise. The library features easy-to-use native LabVIEW VIs for controlling and commanding robots directly from a graphical development environment. With this library, you can program a single LabVIEW application that integrates all aspects of machine control and automation from part-handling and robot control to advanced measurements, inspection, machine vision and HMI. Using this approach, you do not need to learn specialized robotics programming software, which means you can achieve higher performance and better results in less time.
The entire application is developed in NI’s powerful LabVIEW Graphical Design Environment. It can be downloaded for execution to various Windows or LabVIEW Real-Time targets like smart cameras, NI CompactRIO, and NI PXI platforms to achieve industry-proven speed and reliability.
Main features
- Build complete industrial robotics systems directly from NI LabVIEW
- Directly control movements and motion of Denso robots
- Run and monitor pre-existing routines on Denso robot controllers
- Easily develop vision-guided robotics applications
- Integrate measurements, sensors, and vision into robotics systems
- Build highly flexible test and inspection systems
Supported functions
- Open Session
- Close Session
- Servo ON/OFF
- Start Toolkit
- Set/Get External Speed
- Set/Get Internal Speed
- Get Current Position
- Set/Get Variable
- Reset Errors
- Get Status

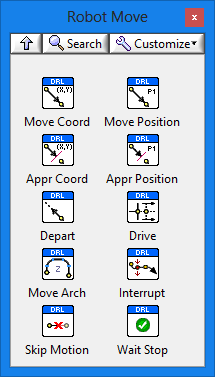
- Move by Coordinate
- Move by Position Name
- Approach by Coordinate
- Approach by Position Name
- Depart
- Drive
- Move Arch
- Interrupt
- Skip Motion
- Wait Stop
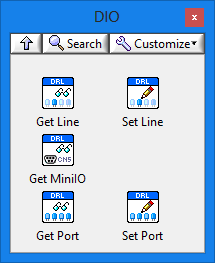
- Get Line
- Set Line
- Get MiniIO
- Get Port
- Set Port
- Start Task
- Stop Task
- Get Task Status
- Get Task Properties
- Wait Task Stop
- Set/Get Parameter
- Set/Get Parameter Array
- Set/Get Current Tool
- Set/Get Tool
- Set/Get Current Work
- Set/Get Work
- Set/Get Payload Mass
- Set/Get Payload COG
- Set/Get Software Motion Limits
- Set/Get Area
- Get Motion Completion
- Pose Data Conversion
- User Extension Command
- Set/Get Ext Motion Parameters
System requirements
- 4-axis (SCARA)
- 5- and 6-axis
- RC7M
- RC8
- COBOTTA
- 2.8 or higher (RC7M)
- 1.4.5 or higher (RC8)
LabVIEW 2012 or later
OS
- Windows 10/8/7/Vista/XP/2000
- NI Real-Time
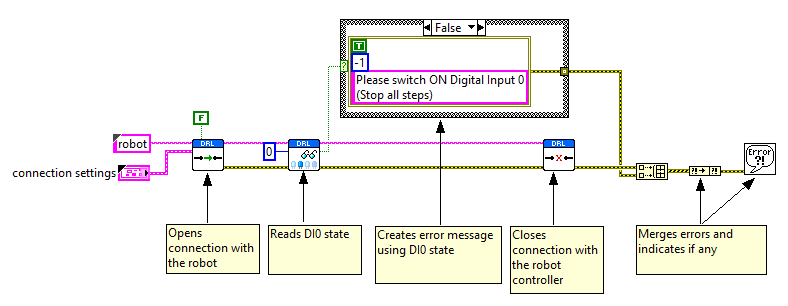
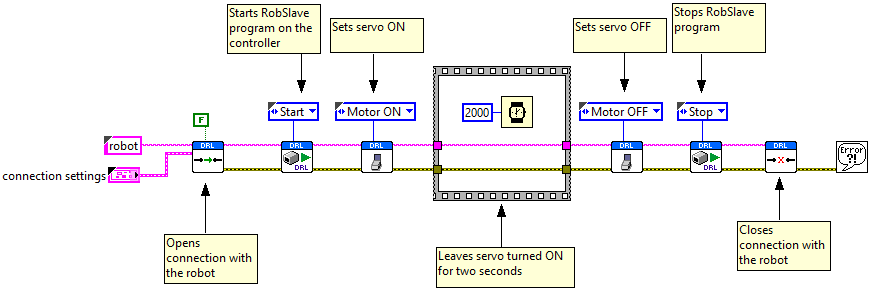
Code examples