Библиотека DigiMetrix Robotics для DENSO

Краткий обзор
С помощью библиотеки DigiMetrix Robotics для DENSO вы можете легко интегрировать современный промышленный манипулятор в новые системы автоматизированных инспекций и тестирования, автоматизации лабораторий и производства, без необходимости освоения специализированных языков программирования роботов. Библиотека содержит простые в использовании LabVIEW VI’s для задания параметров и управления движением робота непосредственно из графической среды разработки. Вся функциональность сложной системы реализуется в единой эффективной графической среде разработки NI LabVIEW, включая управление роботами, ввод-вывод различных сигналов, взаимодействие с промышленным оборудованием по специализированным интерфейсам, машинное зрение и интерфейс оператора. Используя такой подход, вы с большей производительностью создаете надежные комплексные решения с широким набором функций.
Поскольку всё приложение разработано в среде графического программирования NI LabVIEW его можно загрузить для выполнения на ПК под управлением Windows, на различные проверенные промышленные платформы реального времени на базе LabVIEW Real-Time, такие как NI CompactRIO/CompactDAQ, CVS и NI PXI, для достижения требуемых скорости и надежности выполнения.
Основные особенности
- Создавайте полные системы промышленной робототехники прямо из NI LabVIEW
- Непосредственно управляйте движением роботов Denso
- Запускайте и управляйте уже существующими процедурами на контроллерах роботов Denso
- Легко разрабатывайте приложения для робототехники с компьютерным зрением
- Интегрируйте модули измерения, датчиков и компьютерного зрения в робототехнические системы
- Создавайте очень гибкие системы тестирования и инспекции
Поддерживаемые функции
- Open Session
- Close Session
- Servo ON/OFF
- Start Toolkit
- Set/Get External Speed
- Set/Get Internal Speed
- Get Current Position
- Set/Get Variable
- Reset Errors
- Get Status

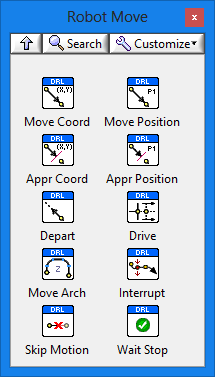
- Move by Coordinate
- Move by Position Name
- Approach by Coordinate
- Approach by Position Name
- Depart
- Drive
- Move Arch
- Interrupt
- Skip Motion
- Wait Stop
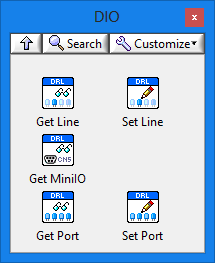
- Get Line
- Set Line
- Get MiniIO
- Get Port
- Set Port
- Start Task
- Stop Task
- Get Task Status
- Get Task Properties
- Wait Task Stop
- Set/Get Parameter
- Set/Get Parameter Array
- Set/Get Current Tool
- Set/Get Tool
- Set/Get Current Work
- Set/Get Work
- Set/Get Payload Mass
- Set/Get Payload COG
- Set/Get Software Motion Limits
- Set/Get Area
- Get Motion Completion
- Pose Data Conversion
- User Extension Command
- Set/Get Ext Motion Parameters
Системные требования
- 4-осевые (SCARA)
- 5- и 6-осевые
- RC7M
- RC8
- COBOTTA
- 2.8 и выше (RC7M)
- 1.4.5 и выше (RC8)
LabVIEW 2012 и выше
Операционная система
- Windows 10/8/7/Vista/XP/2000
- NI Real-Time
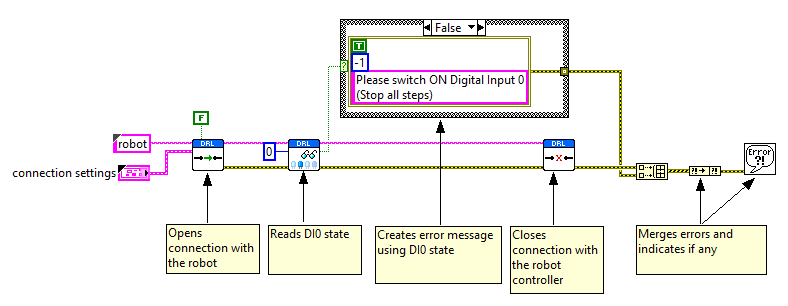
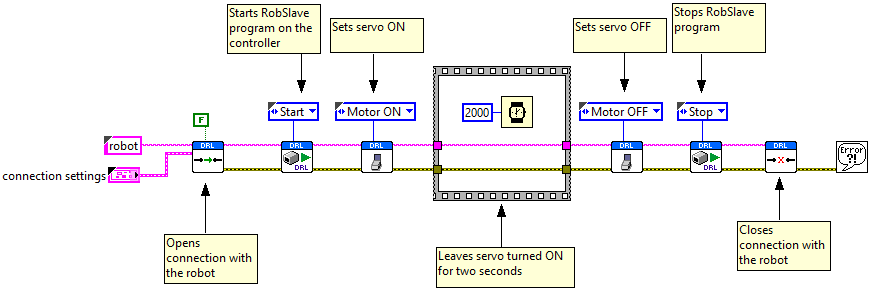
Примеры кода