Библиотека DigiMax Robotics для YASKAWA MOTOMAN
Краткий обзор
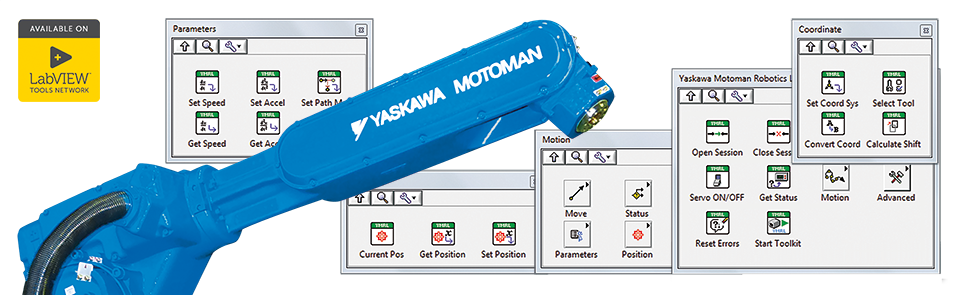
С помощью библиотеки DigiMax Robotics для YASKAWA MOTOMAN вы можете легко интегрировать робототехнику в новые типы систем и приложений для автоматизированного тестирования, автоматизации лабораторий и производства, устраняя необходимость в сложном программировании робототехники. Библиотека содержит простые в использовании виртуальные приборы LabVIEW для управления роботами непосредственно из графической среды разработки. С помощью этой библиотеки вы можете запрограммировать единое приложение LabVIEW, которое объединяет все аспекты управления и автоматизации, от обработки деталей и управления роботами до расширенных измерений, контроля, машинного зрения и HMI. Используя этот подход, вам не нужно изучать специализированное программное обеспечение для программирования робототехники, что означает, что вы можете достичь более высокой производительности и лучших результатов за меньшее время.
Всё приложение разработано в среде графического программирования NI LabVIEW. Его можно загрузить для выполнения в различные устройства реального времени Windows или LabVIEW, такие как интеллектуальные камеры, платформы NI CompactRIO и NI PXI, чтобы добиться проверенных в отрасли скорости и надежности.
Вы можете начать трехмерное моделирование фабрики от Visual Components даже без настоящих роботов и производить автономное программирование, обнаружение столкновений и планирование проходов, чтобы подготовиться к использованию в реальных условиях!
Основные особенности
- Создавайте полные системы промышленной робототехники прямо из NI LabVIEW
- Непосредственно управляйте движением роботов Yaskawa Motoman
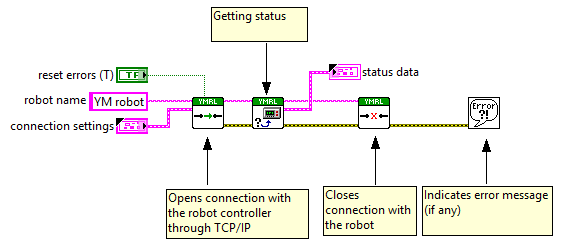
- Запускайте и отслеживайте уже существующие процедуры на контроллерах роботов Yaskawa Motoman
- Легко разрабатывайте приложения для робототехники с компьютерным зрением
- Интегрируйте модули измерения, датчиков и компьютерного зрения в робототехнические системы
- Создавайте очень гибкие системы тестирования и инспекции
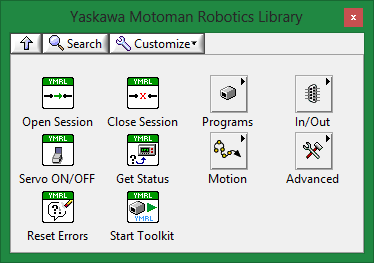
Поддерживаемые функции
- Open Session
- Servo ON/OFF
- Start Toolkit
- Get Status
- Reset Errors
- Close Session
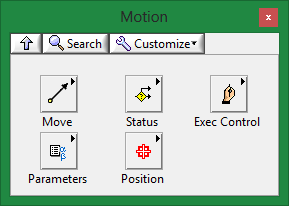
- Move
- Move Synchro
- Move Linear
- Move Relative
- Status
- Get Status
- Wait Stop
- Execution Control
- Stop
- Parameters
- Set Speed
- Get Speed
- Set Acceleration/ Deceleration
- Get Acceleration/ Deceleration
- Set Path Mode
- Get Path Mode
- Position
- Get Current Position
- Get Position
- Set Position
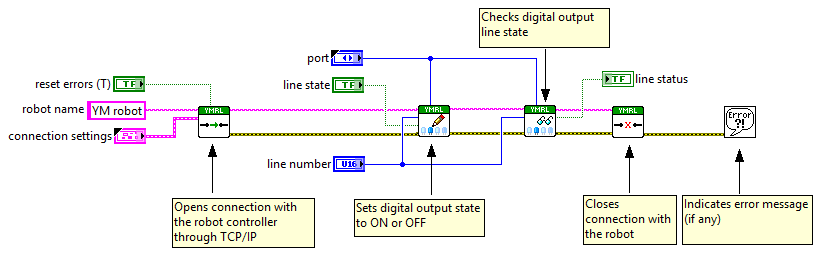
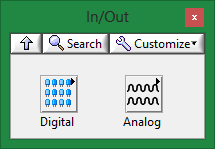
- Digital
- Set Line
- Get Line
- Set Port
- Get Port
- Generate Pulse
- Reset Output
- Analog
- Set Analog Line
- Start Speed Line
- Stop Speed Line
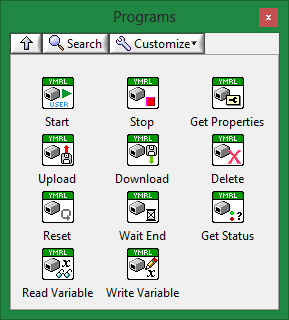
- Start Program
- Stop Program
- Get Program Properties
- Uplaod Program
- Download Program
- Delete Program
- Reset Program
- Wait Program End
- Get Program Status
- Read Variable
- Write Variable
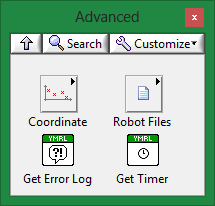
- Robot Files
- Get Directory
- Coordinate
- Set Coordinate System
- Convert Coordinate
- Select Tool
- Calculate Shift
- Get Error Log
- Get Timer
Системные требования
- 5- and 6-axis
- SCARA
- Delta robots with FS100 controller
- 3D Factory Simulation from Visual Components сompatible!
- DX100 controller DS1.63-14 v3.82 or higher MotoPlus-enabled-version
- FS100 controller with FS1.11-00 or higher standard-version firmware
- DX200 controller
- YRC1000 and YRC1000micro with non-collaborative robots
- YRC1000 with collaborative robots is supported with YAS2.80.00-00 or newer version firmware
- YRC1000micro with collaborative robots is supported with YBS2.31.00-00 or newer firmware
LabVIEW 2012 or later
OS
- Windows 10/8/7/Vista/XP/2000
- NI Real-Time
Примеры кода