Библиотека DigiMetrix Robotics для KUKA

Краткий обзор
С помощью библиотеки DigiMetrix Robotics для KUKA вы можете легко интегрировать робототехнику в новые типы систем и приложений для автоматизированного тестирования, автоматизации лабораторий и производства, устраняя необходимость в сложном программировании робототехники. Библиотека содержит простые в использовании виртуальные приборы LabVIEW для управления роботами непосредственно из графической среды разработки. С помощью этой библиотеки вы можете запрограммировать единое приложение LabVIEW, которое объединяет все аспекты управления и автоматизации, от обработки деталей и управления роботами до расширенных измерений, контроля, машинного зрения и HMI. Используя этот подход, вам не нужно изучать специализированное программное обеспечение для программирования робототехники, что означает, что вы можете достичь более высокой производительности и лучших результатов за меньшее время.
Всё приложение разработано в среде графического программирования NI LabVIEW. Его можно загрузить для выполнения в различные устройства реального времени Windows или LabVIEW, такие как интеллектуальные камеры, платформы NI CompactRIO и NI PXI, чтобы добиться проверенных в отрасли скорости и надежности.
Основные особенности
- Создавайте полные системы промышленной робототехники прямо из NI LabVIEW
- Непосредственное управляйте движением роботов KUKA
- Легко разрабатывайте приложения для робототехники с компьютерным зрением
- Интегрируйте модули измерения, датчиков и компьютерного зрения в робототехнические системы
- Создавайте очень гибкие системы тестирования и инспекции
Поддерживаемые функции
- Main
- Open Session
- Close Session
- Start Toolkit
- mxAutomation Client
- Get Status
- Get Version
- Reset Errors

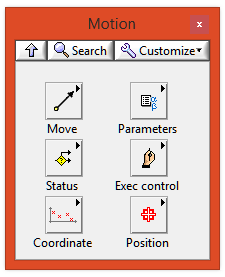
- Move
- Move PTP
- Move Linear
- Move Relative
- Move Circular
- Parameters
- Set Speed
- Get Speed
- Set Acceleration/Deceleration
- Get Acceleration/Deceleration
- Set CP Mode
- Get CP Mode
- Set Motion Limits
- Get Motion Limits
- Set Load
- Get Load
- Status
- Wait Stop
- Motion status
- Execution Control
- Pause Motion
- Resume Motion
- Stop Motion
- Set motion interrupt
- Get motion interrupt status
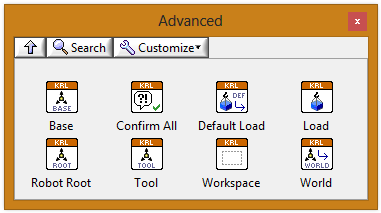
- Coordinate
- Select Tool
- Select Coordinate
- Set Tool
- Get Tool
- Set Coordinate System
- Get Coordinate System
- Status
- Get current position
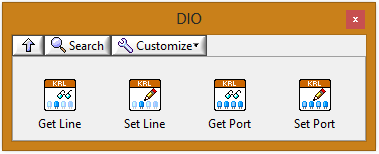
- Digital
- Set Line
- Get Line
- Set Digital Port
- Generate Digital Pulse
- Set Motion Output
- Set Motion Input
- Analog
- Get Line
- Set Line
- Jogging
- Guide
- Read TP Key
- Maintenance
- Mastering Test
- Brake Test
- mxAutomation
- Get System Variable
- Set System Variable
Системные требования
- Контроллер KUKA KR C4
- KUKA KSS 8.3.21 и выше
- KUKA.PLC mxAutomation 2.1.4 и выше
- WorkVisual 4.0.10 и выше для конфигурации KR C
- Microsoft Windows XP, 7, 8, 10 (32 & 64 bit)
- Ethernet
или LabVIEW Real-Time target
- NI PXI, NI cRIO/cDAQ или NI CVS контроллеры для LabVIEW Real-Time
- LabVIEW 2012 и выше
- VI Package Manager 2014 и выше
Примеры кода





