DigiMetrix Robotics Library for Schunk WSG Gripper

Overview
With the DigiMetrix Robotics Library for Schunk WSG Gripper, you can easily integrate intelligent gripper with force control into new types of systems and applications for automated test, laboratory automation, and flexible manufacturing – eliminating complex robotics programing expertise. The library features easy-to-use native LabVIEW VIs for controlling and commanding intelligent gripper directly from a graphical development environment. With this library and other robotics libraries for leading brands, you can program a single LabVIEW application that integrates all aspects of machine control and automation from part-handling and robot control to advanced measurements, inspection, machine vision and HMI. Using this approach, you do not need to learn specialized robotics programming software or gripper communication protocol, which means you can achieve higher performance and better results in less time.
The entire application is developed in NI’s powerful LabVIEW Graphical Design Environment. It can be downloaded for execution to various Windows or LabVIEW Real-Time targets like smart cameras, NI CompactRIO, and NI PXI platforms to achieve industry-proven speed and reliability.
Main features
- Native LabVIEW interface to use Schunk WSG Gripper with force control. No need to write your own communication code
- Easy integration with other DigiMetrix Robotics Libraries for leading robotics brands and NI Vision
- The library supports Windows and LabVIEW Real-Time platforms
- TCP/IP over Ethernet is used for communication
- Every function (VI) has own documentation and terminal description
- The library is compatible with LabVIEW 2009 and above
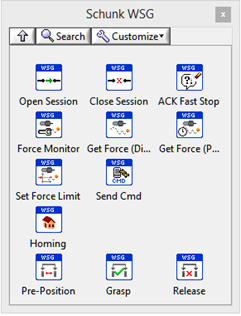
Supported functions
- Open Session
- Close Session
- ACK Fast Stop
- Grasp
- Release
- Set Force Monitor Mode
- Get Force (Direct), (Pereodic)
- Set Force Limit
- Pre-position
- Homing
- Send general WSG Command
System requirements
- SCARA
- 6-axis
- Linear arm
- The library should work with the updated versions of firmware
LabVIEW 2009 or later
OS
- Windows 10/8/7/Vista/XP/2000
- NI Real-Time
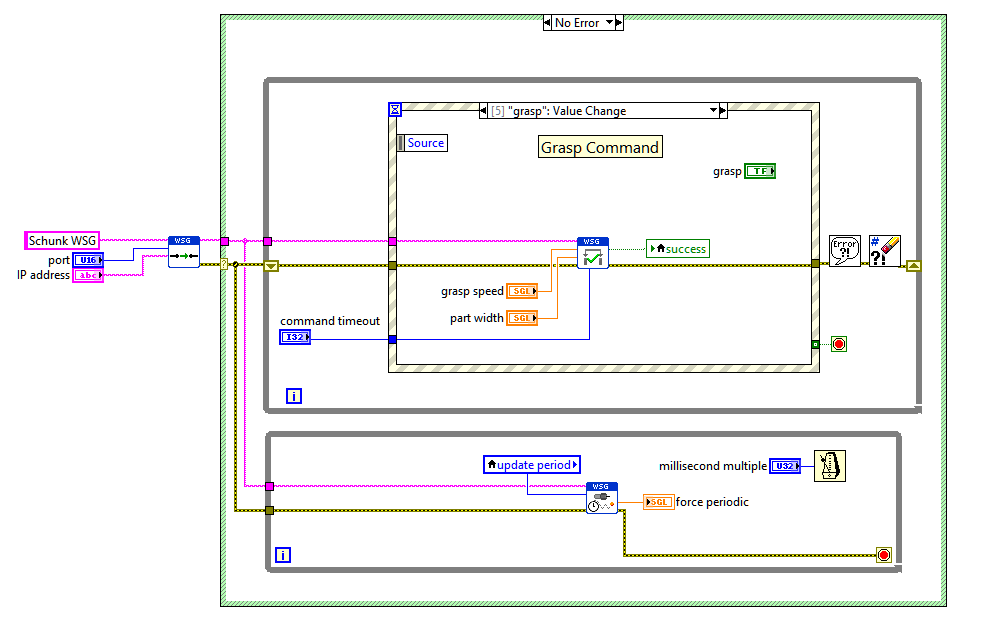
Code examples