DigiMetrix Robotics Bibliothek für SCHUNK WSG Gripper

Übersicht
Mit der DigiMetrix Robotics Bibliothek für SCHUNK WSG Gripper sind Sie in der Lage, auf einfache Weise Robotik in neue Arten von Systemen und Applikationen für Testautomatisierung, Laborautomatisierung und flexible Produktion zu integrieren – ohne tiefgreifende Kenntnisse komplexer Roboterprogrammierung. Die Bibliothek bietet einfach zu verwendende native LabVIEW VIs zur Steuerung und Kontrolle von Robotern direkt aus einer grafischen Entwicklungsumgebung. Mit dieser Bibliothek können Sie eine LabVIEW Anwendung programmieren, die alle Aspekte von Maschinensteuerung und Automatisierung integriert, von Teilehandhabung und Robotersteuerung bis zu komplexen Messaufgaben, Inspektion, Machine Vision und HMI. Durch diesen Ansatz müssen Sie sich nicht erst in spezielle Roboterprogrammiersoftware einarbeiten, so dass Sie eine höhere Performance und bessere Ergebnisse in kürzester Zeit erreichen.
Die gesamte Applikation ist entwickelt in NIs leistungsfähiger LabVIEW Grafischer Design Entwicklungsumgebung. Sie kann zur Ausführung auf verschiedene Windows oder LabVIEW Real-Time Targets wie Smart Cameras, NI CompactRIO und NI PXI Plattformen verteilt werden, um industrietaugliche Zuverlässigkeit und Geschwindigkeit zu erreichen.
Hauptmerkmale
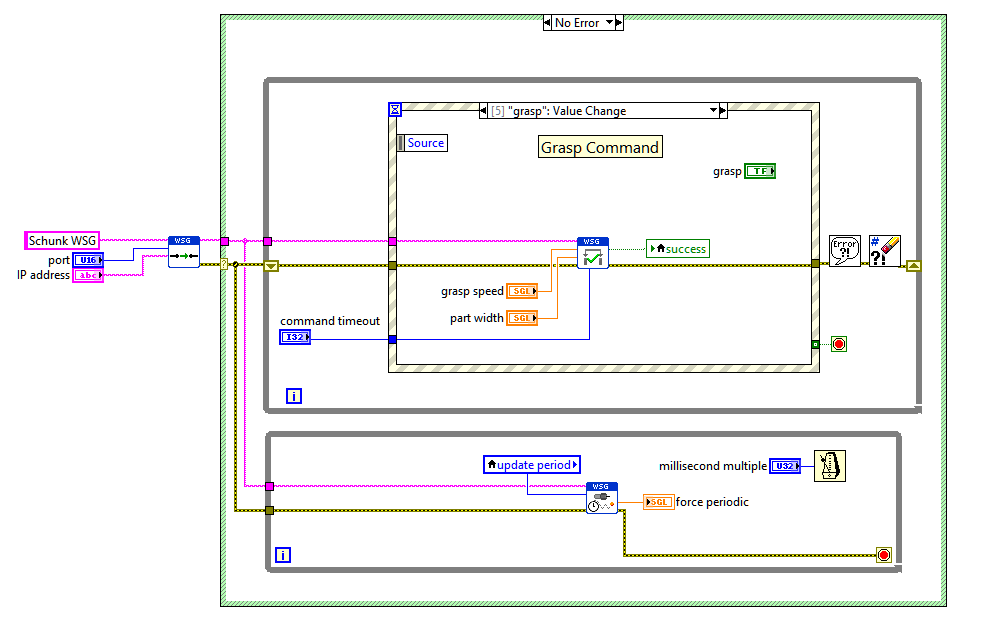
- Native LabVIEW interface to use SCHUNK WSG Gripper with force control. No need to write your own communication code
- Easy integration with other DigiMetrix Robotics Libraries for leading robotics brands and NI Vision
- The library supports Windows and LabVIEW Real-Time platforms
- TCP/IP over Ethernet is used for communication
- Every function (VI) has own documentation and terminal description
- The library is compatible with LabVIEW 2009 and above
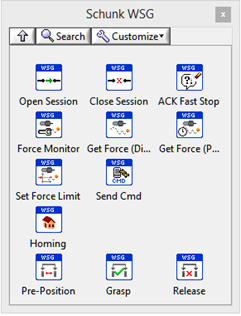
Verfügbare Funktionen
- Open Session
- Close Session
- ACK Fast Stop
- Grasp
- Release
- Set Force Monitor Mode
- Get Force (Direct), (Pereodic)
- Set Force Limit
- Pre-position
- Homing
- Send general WSG Command
Systemanforderungen
- SCARA
- 6-axis
- Linear arm
- Die Bibliothek sollte mit den aktualisierten Firmware-Versionen funktionieren
LabVIEW 2009 oder neuer
Betriebssystem
- Windows 8/7/Vista/XP/2000
- NI Real-Time
Code Beispiele