DigiMetrix Robotics Bibliothek für ABB

Übersicht
Mit der DigiMetrix Robotics Bibliothek für ABB sind Sie in der Lage, auf einfache Weise Robotik in neue Arten von Systemen und Applikationen für Testautomatisierung, Laborautomatisierung und flexible Produktion zu integrieren – ohne tiefgreifende Kenntnisse komplexer Roboterprogrammierung. Die Bibliothek bietet einfach zu verwendende native LabVIEW VIs zur Steuerung und Kontrolle von Robotern direkt aus einer grafischen Entwicklungsumgebung. Mit dieser Bibliothek können Sie eine LabVIEW Anwendung programmieren, die alle Aspekte von Maschinensteuerung und Automatisierung integriert, von Teilehandhabung und Robotersteuerung bis zu komplexen Messaufgaben, Inspektion, Machine Vision und HMI. Durch diesen Ansatz müssen Sie sich nicht erst in spezielle Roboterprogrammiersoftware einarbeiten, so dass Sie eine höhere Performance und bessere Ergebnisse in kürzester Zeit erreichen.
Die gesamte Applikation ist entwickelt in NIs leistungsfähiger LabVIEW Grafischer Design Entwicklungsumgebung. Sie kann zur Ausführung auf verschiedene Windows oder LabVIEW Real-Time Targets wie Smart Cameras, NI CompactRIO und NI PXI Plattformen verteilt werden, um industrietaugliche Zuverlässigkeit und Geschwindigkeit zu erreichen.
Hauptmerkmale
- Erstellen kompletter Industrierobotersysteme direkt aus NI LabVIEW
- Direkte Bewegungssteuerung von ABB Robotern
- Einfache Entwicklung von Kamera-geführten Robotikapplikationen
- Integrieren von Messaufgaben, Sensorik und Vision in Robotiksysteme
- Erstellen von hochflexiblen Test- und Inspektionssystmen
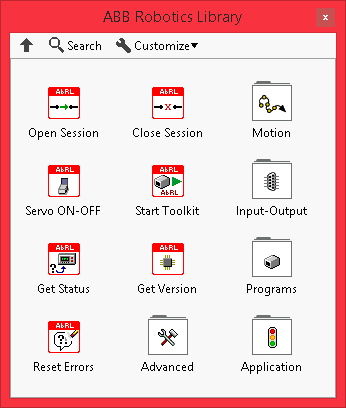
Verfügbare Funktionen
-
- Open Session
- Close Session
- Servo On-OFF
- Start Toolkit
- Get Status
- Get Version
- Reset Errors
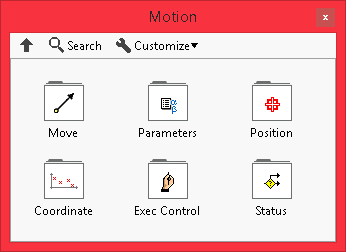
- Move
- MoveP2P
- Move Linear
- Move Relative
- Move Rotational
- Approach
- Move Circular
- Search
- Parameters
- Set Speed
- Get Speed
- Set Acceleration
- Get Acceleration
- Set Continuos Path Mode
- Get Continuos Path Mode
- Get Load
- Set Load
- Advanced Parameters
- Position
- Get Current Position
- Get Searched Position
- Set Position
- Get Position
- Convert Position
- Calculate Position
- Coordinate
- Set Tool
- Get Tool
- Select Tool
- Get Selected Tool
- Set Coordinate System
- Get Coordinate System
- Select Coordinate System
- Get Selected Coordinate System
- Calculate Coordinate System
- Status
- Wait Motion Stop
- Get Buffer Status
- Wait Buffer Status
- Multimove
- Get Syncronized Tasks
- Set Syncronized Tasks
- Sync Mode ON/OFF
- Sync Tasks
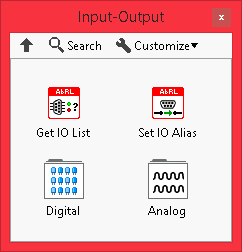
- Digital
- Set Digital Line
- Get Digital Line
- Set Digital Port
- Get Digital Port
- Generate Pulse
- Analog
- Get Analog Line
- Set Analog Line
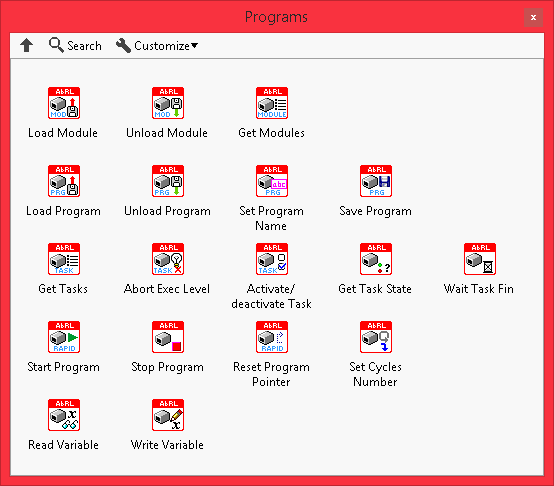
- Program
- Load Module
- Unload Module
- Get Modules
- Load Program
- Unload Program
- Set Program Name
- Save Program
- Get Tasks
- Abort Exec Level
- Activate/Deactivate Task
- Get Task State
- Wait Task Fin
- Start Program
- Stop Program
- Reset Program Pointer
- Set Cycles Number
- Read Variable
- Write Variable
- Jugging
- Guide

- Maintenance
- Get Log
- Clear Log
- Reboot
- Set Controller Time
- Create Backup
- Restore Backup
- Check Restore
- Get Backup State
- Robot Files
- Get Directory
- Download File
- Upload File
- Delete File
- Copy File
- Rename File
- Create Directory
- Access Rights
- Acquire Mastership
- Release Mastership
- Login
- Safety
- Get Safety Config Status
- Load Safety Config
- Get Safety Mode
- Set Safety Mode
- Get Safety Violation Info
- Get Safety Version
- Get CBC Status
- External Axes
- MechUnit On/OFF
Systemanforderungen
ABB Systemanforderungen
- IRC5 ABB-Steuerungsfamilie: IRC5, IRC5C, IRC5P, IRC5 PMC
- RobotWare 6.x oder neuer
- Controller Software Optionen PC Schnittstelle (616-1) und Multitasking (623-1)
PC Systemanforderungen
- Microsoft Windows XP, 7, 8, 10 (32 & 64 bit)
- Ethernet
oder LabVIEW Real-Time Target
- NI PXI, NI cRIO/cDAQ oder NI CVS Controllers mit LabVIEW Real-Time
Software
- LabVIEW 2012 oder höher
- VI Package Manager 2014 oder höher
- LabVIEW 2012 and higher
- VI Package Manager 2014 or later
Code Beispiele






