DigiMetrix Robotics Bibliothek für EPSON

Übersicht
Mit der DigiMetrix Robotics Bibliothek für EPSON sind Sie in der Lage, auf einfache Weise Robotik in neue Arten von Systemen und Applikationen für Testautomatisierung, Laborautomatisierung und flexible Produktion zu integrieren – ohne tiefgreifende Kenntnisse komplexer Roboterprogrammierung. Die Bibliothek bietet einfach zu verwendende native LabVIEW VIs zur Steuerung und Kontrolle von Robotern direkt aus einer grafischen Entwicklungsumgebung. Mit dieser Bibliothek können Sie eine LabVIEW Anwendung programmieren, die alle Aspekte von Maschinensteuerung und Automatisierung integriert, von Teilehandhabung und Robotersteuerung bis zu komplexen Messaufgaben, Inspektion, Machine Vision und HMI. Durch diesen Ansatz müssen Sie sich nicht erst in spezielle Roboterprogrammiersoftware einarbeiten, so dass Sie eine höhere Performance und bessere Ergebnisse in kürzester Zeit erreichen.
Die gesamte Applikation ist entwickelt in NIs leistungsfähiger LabVIEW Grafischer Design Entwicklungsumgebung. Sie kann zur Ausführung auf verschiedene Windows oder LabVIEW Real-Time Targets wie Smart Cameras, NI CompactRIO und NI PXI Plattformen verteilt werden, um industrietaugliche Zuverlässigkeit und Geschwindigkeit zu erreichen.
Hauptmerkmale
- Erstellen kompletter Industrierobotersysteme direkt aus NI LabVIEW
- Direkte Bewegungssteuerung von EPSON Robotern
- Einfache Entwicklung von Kamera-geführten Robotikapplikationen
- Integrieren von Messaufgaben, Sensorik und Vision in Robotiksysteme
- Erstellen von hochflexiblen Test- und Inspektionssystmen
Verfügbare Funktionen
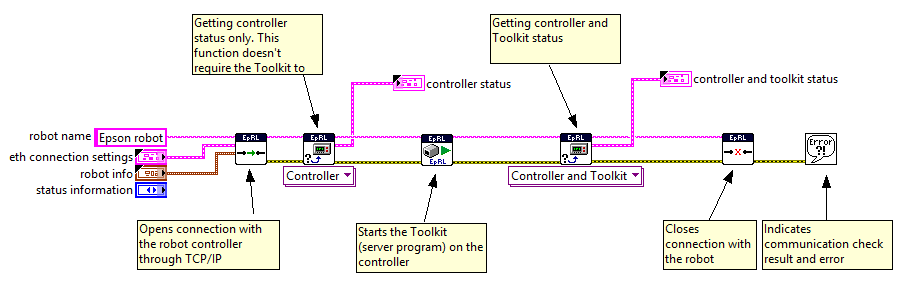
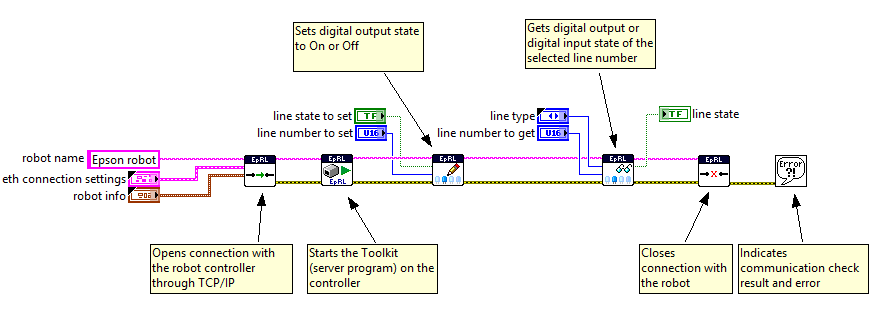
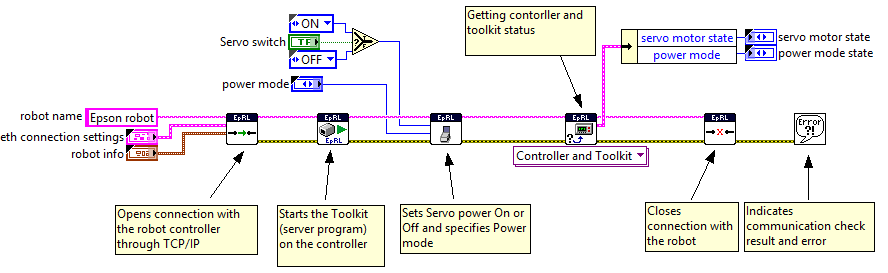
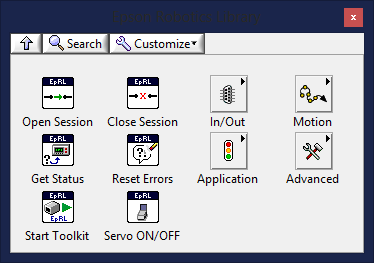
- Open Session
- Servo ON/OFF
- Start Toolkit
- Get Status
- Reset Errors
- Close Session
- Move
- Move Synchro
- Move Linear
- Move Relative
- Move Arch
- Move Circular
- Move Home
- Status
- Get Status
- Wait Stop
- Execution Control
- Pause
- Resume
- Stop
- Parameters
- Set Speed
- Get Speed
- Set Acceleration/Deceleration
- Get Acceleration/Deceleration
- Set Path Mode
- Get Path Mode
- Set Accuracy
- Get Accuracy
- Position
- Get Current Position
- Get Destination
- Get Position
- Set Position
- Set Home Position
- Digital
- Set Line
- Get Line
- Set Port
- Get Port
- Generate Pulse

- Palletizing
- Init Pallet
- Get Point
- Move Pallet

- Configuration
- Set Load
- Get Load
- Set Torque
- Get Torque
- Set Limits
- Get Limits
- Set Brakes
- Coordinate
- Set Coordinate System
- Get Coordinate System
- Convert Coordinate
- Select Tool
- Set Tool
- Get Error Log
- Get Version
Systemanforderungen
- ProSix (6-Achsen)
- SCARA
- SPIDER (RS)
- RC90
- RC170
- RC180
- RC520
- RC620
- RC700
- Epson RC+ 5.*
- Epson RC+ 6.*
- Epson RC+ 7.*
- KEINE braucht VB Guide zu kaufen
LabVIEW 2012 oder neuer
Betriebssystem
- Windows 10/8/7/Vista/XP/2000
- NI Real-Time
Code Beispiele