Библиотека DigiMetrix Robotics для ABB

Краткий обзор
С помощью библиотеки DigiMetrix Robotics для ABB вы можете легко интегрировать современный промышленный манипулятор в новые системы автоматизированных инспекций и тестирования, автоматизации лабораторий и производства, без необходимости освоения специализированных языков программирования роботов. Библиотека содержит простые в использовании LabVIEW VI’s для задания параметров и управления движением робота непосредственно из графической среды разработки. Вся функциональность сложной системы реализуется в единой эффективной графической среде разработки NI LabVIEW, включая управление роботами, ввод-вывод различных сигналов, взаимодействие с промышленным оборудованием по специализированным интерфейсам, машинное зрение и интерфейс оператора. Используя такой подход, вы с большей производительностью создаете надежные комплексные решения с широким набором функций.
Поскольку всё приложение разработано в среде графического программирования NI LabVIEW его можно загрузить для выполнения на ПК под управлением Windows, на различные проверенные промышленные платформы реального времени на базе LabVIEW Real-Time, такие как NI CompactRIO/CompactDAQ, CVS и NI PXI, для достижения требуемых скорости и надежности выполнения.
Основные особенности
- Создавайте полные системы промышленной робототехники полностью в LabVIEW
- Непосредственно управляйте движением роботов ABB
- Запускайте и останавливайте на контроллере ABB робота программы на языке RAPID
- Легко разрабатывайте приложения для робототехники с компьютерным зрением
- Интегрируйте модули измерения и компьютерного зрения в робототехнические системы
Поддерживаемые функции
-
- Open Session
- Close Session
- Servo On-OFF
- Start Toolkit
- Get Status
- Get Version
- Reset Errors
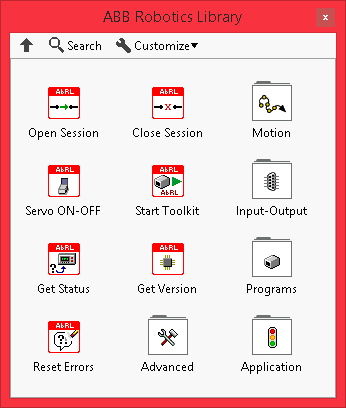
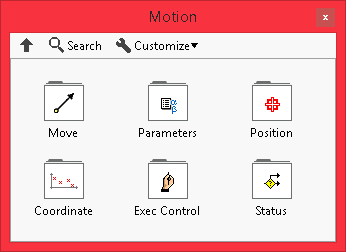
- Move
- MoveP2P
- Move Linear
- Move Relative
- Move Rotational
- Approach
- Move Circular
- Search
- Parameters
- Set Speed
- Get Speed
- Set Acceleration
- Get Acceleration
- Set Continuos Path Mode
- Get Continuos Path Mode
- Get Load
- Set Load
- Advanced Parameters
- Position
- Get Current Position
- Get Searched Position
- Set Position
- Get Position
- Convert Position
- Calculate Position
- Coordinate
- Set Tool
- Get Tool
- Select Tool
- Get Selected Tool
- Set Coordinate System
- Get Coordinate System
- Select Coordinate System
- Get Selected Coordinate System
- Calculate Coordinate System
- Status
- Wait Motion Stop
- Get Buffer Status
- Wait Buffer Status
- Multimove
- Get Syncronized Tasks
- Set Syncronized Tasks
- Sync Mode ON/OFF
- Sync Tasks
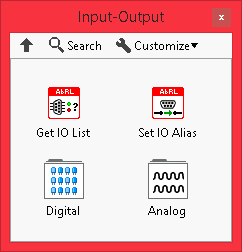
- Digital
- Set Digital Line
- Get Digital Line
- Set Digital Port
- Get Digital Port
- Generate Pulse
- Analog
- Get Analog Line
- Set Analog Line
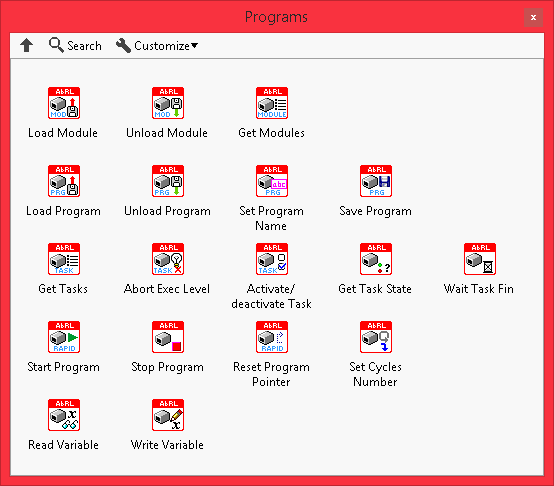
- Program
- Load Module
- Unload Module
- Get Modules
- Load Program
- Unload Program
- Set Program Name
- Save Program
- Get Tasks
- Abort Exec Level
- Activate/Deactivate Task
- Get Task State
- Wait Task Fin
- Start Program
- Stop Program
- Reset Program Pointer
- Set Cycles Number
- Read Variable
- Write Variable
- Jugging
- Guide

- Maintenance
- Get Log
- Clear Log
- Reboot
- Set Controller Time
- Create Backup
- Restore Backup
- Check Restore
- Get Backup State
- Robot Files
- Get Directory
- Download File
- Upload File
- Delete File
- Copy File
- Rename File
- Create Directory
- Access Rights
- Acquire Mastership
- Release Mastership
- Login
- Safety
- Get Safety Config Status
- Load Safety Config
- Get Safety Mode
- Set Safety Mode
- Get Safety Violation Info
- Get Safety Version
- Get CBC Status
- External Axes
- MechUnit On/OFF
Системные требования
- Контроллеры семейства IRC5 ABB: IRC5, IRC5C, IRC5P, IRC5 PMC
- RobotWare версии 6.x или выше
- Опции программного обеспечения контроллера PC interface (616-1) и Multitasking (623-1)
- Microsoft Windows XP, 7, 8, 10 (32 & 64 bit)
- Ethernet
или LabVIEW Real-Time target
- NI PXI, NI cRIO/cDAQ или NI CVS контроллеры для LabVIEW Real-Time
- LabVIEW 2012 и выше
- VI Package Manager 2014 и выше
Примеры кода






