Библиотека DigiMetrix Robotics для Kawasaki
Краткий обзор
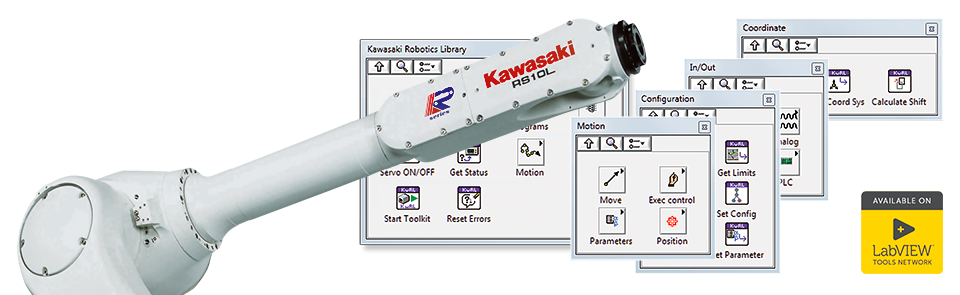
С помощью библиотеки DigiMetrix Robotics для Kawasaki вы можете легко интегрировать робототехнику в новые типы систем и приложений для автоматизированного тестирования, автоматизации лабораторий и производства, устраняя необходимость в сложном программировании робототехники. Библиотека содержит простые в использовании виртуальные приборы LabVIEW для управления роботами непосредственно из графической среды разработки. С помощью этой библиотеки вы можете запрограммировать единое приложение LabVIEW, которое объединяет все аспекты управления и автоматизации, от обработки деталей и управления роботами до расширенных измерений, контроля, машинного зрения и HMI. Используя этот подход, вам не нужно изучать специализированное программное обеспечение для программирования робототехники, что означает, что вы можете достичь более высокой производительности и лучших результатов за меньшее время.
Всё приложение разработано в среде графического программирования NI LabVIEW. Его можно загрузить для выполнения в различные устройства реального времени Windows или LabVIEW, такие как интеллектуальные камеры, платформы NI CompactRIO и NI PXI, чтобы добиться проверенных в отрасли скорости и надежности.
Основные особенности
- Создавайте полные системы промышленной робототехники прямо из NI LabVIEW
- Непосредственно управляйте движением роботов Kawasaki
- Запускайте и управляйте уже существующими процедурами на контроллерах роботов Kawasaki
- Легко разрабатывайте приложения для робототехники с компьютерным зрением
- Интегрируйте модули измерения, датчиков и компьютерного зрения в робототехнические системы
- Создавайте очень гибкие системы тестирования и инспекции
Поддерживаемые функции
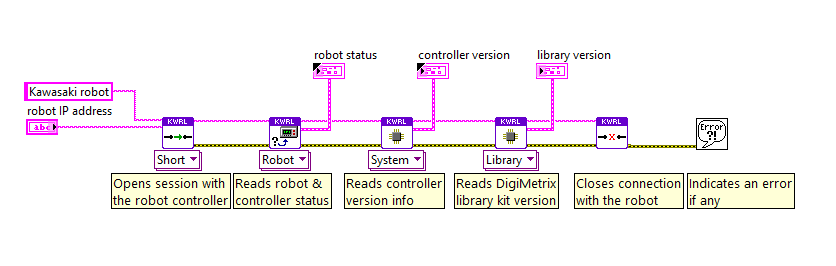
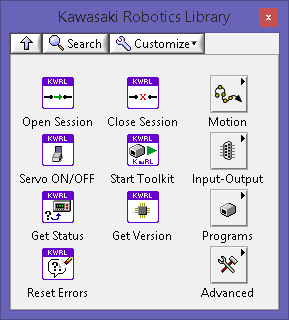
- Open Session
- Close Session
- Servo ON/OFF
- Get Status
- Start Toolkit
- Get Version
- Reset Errors
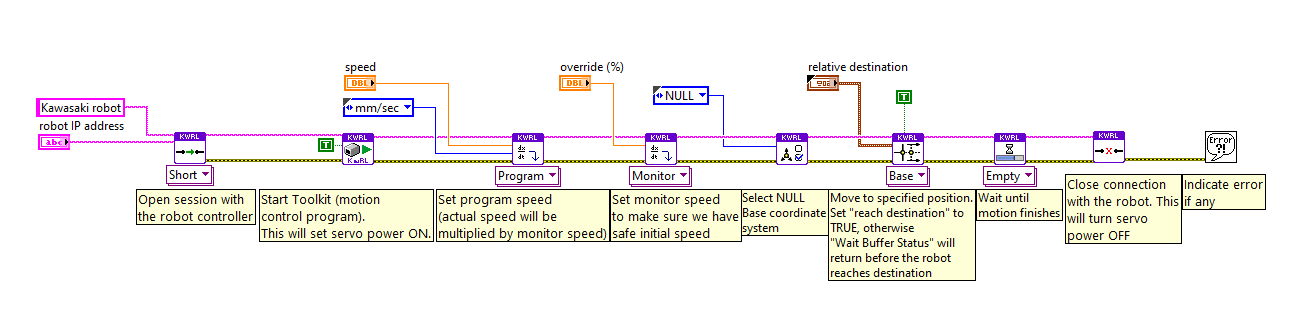
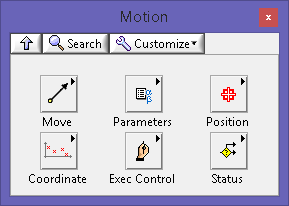
- Move
- Move Linear
- Move PTP
- Move Circular
- Move Relative
- Approach
- Depart
- Move Home
- Interruptable Linear
- Execution Control
- Pause Motion
- Resume Motion
- Stop Motion
- Get Interrupt
- Set Interrupt
- Clear Interrupt
- Delay
- Get Timer
- Clear Timer
- Parameters
- Set Speed
- Get Speed
- Set Accuracy
- Get Accuracy
- Set Comtinious Path Mode
- Get Comtinious Path Mode
- Set Accel/Decel
- Get Accel/Decel
- Set Load
- Get Load
- Set Motion Limits
- Get Motion Limits
- Set Arm Config
- Position
- Set Position
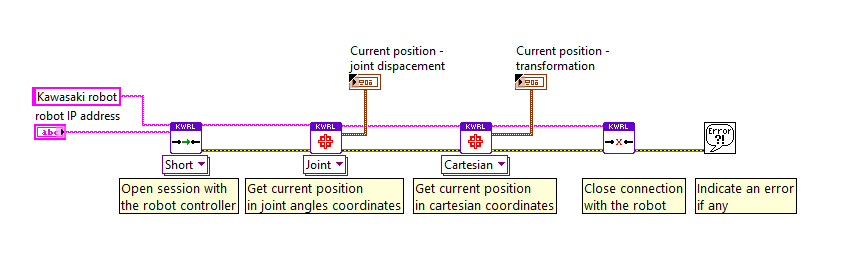
- Get Position
- Get Current Position
- Get Destination
- Set Home
- Coordinate
- Get Tool
- Set Tool
- Select Tool
- Get Selected Tool
- Set Coordinate System
- Get Coordinate System
- Select Coordinate System
- Get Selected Coordinate System
- Calculate Shift
- Status
- Get Buffer Status
- Set Buffer Status
- Digital
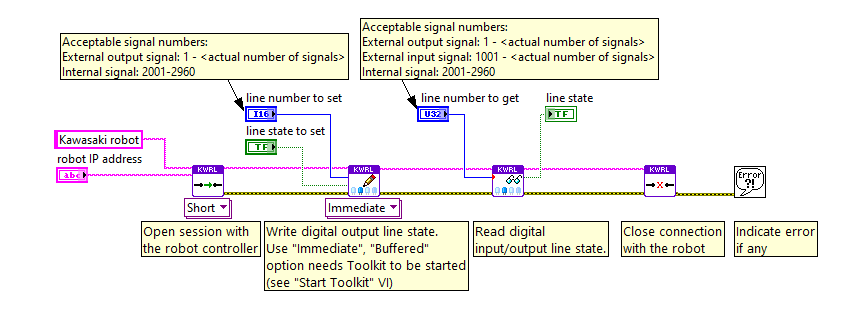
- Set Digital Line
- Get Digital Line
- Set Digital Port
- Get Digital Port
- Generate Digital Pulse
- Reset Digital Outputs
- Analog
- Set Analog Line
- Hand
- Hand Action
- PLC
- Write PLC Data
- Read PLC Data

- Write Variable
- Read Variable
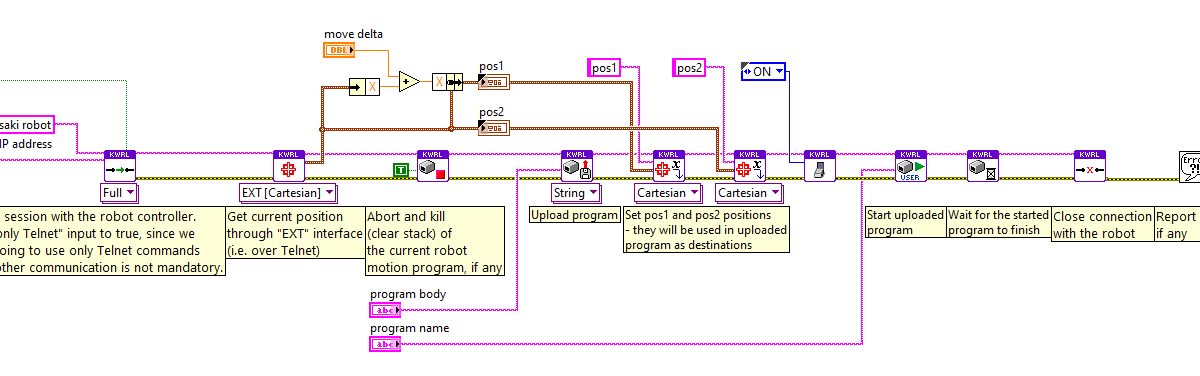
- Upload Program
- Download Program
- Start Program (User)
- Stop Program
- Get Program Status
- Wait Program End
- Reset Program
- Delete Program
- Execute Program
- Maintenance
- Get Error Log
- Get Status
- Get Statistics
- Clear Statistics
- Initialize Controller
- Configuration
- Set Robot Parameter
- Get Robot Parameter
- Robot Files
- Get Directory
- Upload File
- Download File

Системные требования
- 6 осевые роботы
- 7 осевые роботы
- Контроллер D серии с TCP соединением
- Контроллер E серии controller с TCP соединением
- Контроллер серии F
- Свяжитесь с нами для получения отчета о совместимости
LabVIEW 2012 и выше
Операционная система
- Windows 10/8/7/Vista/XP/2000
- NI Real-Time
Примеры кода