Библиотека DigiMetrix Robotics для SCHUNK WSG Gripper

Краткий обзор
С помощью библиотеки DigiMetrix Robotics для SCHUNK WSG Gripper вы можете легко интегрировать робототехнику в новые типы систем и приложений для автоматизированного тестирования, автоматизации лабораторий и производства, устраняя необходимость в сложном программировании робототехники. Библиотека содержит простые в использовании виртуальные приборы LabVIEW для управления роботами непосредственно из графической среды разработки. С помощью этой библиотеки вы можете запрограммировать единое приложение LabVIEW, которое объединяет все аспекты управления и автоматизации, от обработки деталей и управления роботами до расширенных измерений, контроля, машинного зрения и HMI. Используя этот подход, вам не нужно изучать специализированное программное обеспечение для программирования робототехники, что означает, что вы можете достичь более высокой производительности и лучших результатов за меньшее время.
Всё приложение разработано в среде графического программирования NI LabVIEW. Его можно загрузить для выполнения в различные устройства реального времени Windows или LabVIEW, такие как интеллектуальные камеры, платформы NI CompactRIO и NI PXI, чтобы добиться проверенных в отрасли скорости и надежности.
Основные особенности
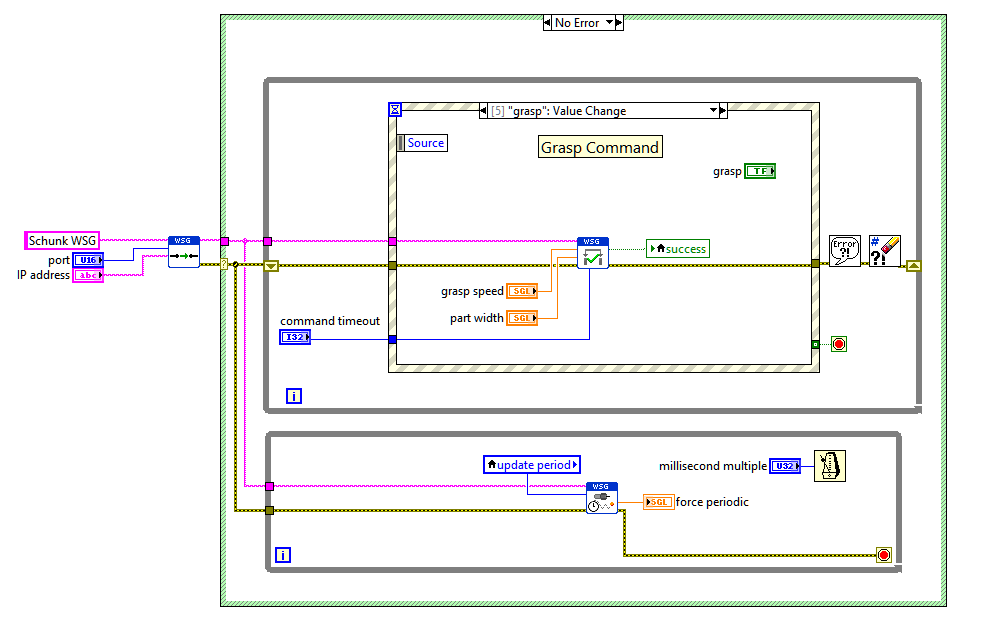
- Собственный интерфейс LabVIEW для использования SCHUNK WSG Gripper с контролем силы. Не нужно писать собственный код для коммуникации
- Простая интеграция с другими библиотеками робототехники DigiMetrix для ведущих производителей робототехники и NI Vision
- Библиотека поддерживает платформы Windows и LabVIEW Real-Time.
- Для связи используется TCP / IP через Ethernet
- Каждая функция (VI) имеет собственную документацию и описание терминала.
- Библиотека совместима с LabVIEW 2009 и выше.
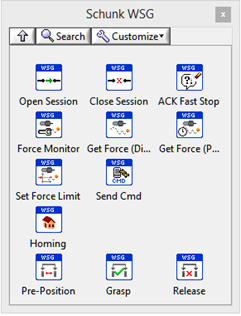
Поддерживаемые функции
- Open Session
- Close Session
- ACK Fast Stop
- Grasp
- Release
- Set Force Monitor Mode
- Get Force (Direct), (Pereodic)
- Set Force Limit
- Pre-position
- Homing
- Send general WSG Command
Системные требования
- SCARA
- 6-осевые
- Линейная рука
- Библиотека должна работать с обновленными версиями прошивок.
LabVIEW 2009 и выше
Операционная система
- Windows 10/8/7/Vista/XP/2000
- NI Real-Time
Примеры кода